Benchmarks¶
This page tracks the canonical baseline numbers for OpenLithoHub's bundled ILT models, plus the differentiable forward models that drive them.
Headline baseline (synthetic-8)¶
Numbers are produced by
against eight hand-rolled 64×64 layouts (square, h-line, line/space, T,
L, cross, contacts, dense lines). The synthetic suite is dataset-free and
runs in seconds, which is why it is the published reference. Real-dataset
numbers can be regenerated locally with --data-root <path>.
| Model | Samples | EPE mean (nm) | Wafer EPE (nm) | L2 (px) | PVB (nm) | MRC pass |
|---|---|---|---|---|---|---|
dummy-identity |
8 | 0.000 | 4.529 | 299.9 | 18.340 | 88% |
rule-based-opc |
8 | 4.242 | 7.786 | 356.4 | 16.000 | 88% |
levelset-ilt (Gaussian PSF) |
8 | 0.322 | 4.482 | 294.9 | 18.516 | 75% |
openilt (L2 + PVBand) |
8 | 0.000 | 4.529 | 299.9 | 18.340 | 88% |
neural-ilt (v0.1 seed weights) |
8 | 0.000 | 4.529 | 299.9 | 18.340 | 88% |
Things worth knowing about these numbers:
- The synthetic patterns are now graded at 8 nm/px so the 64×64 canvas covers a 512 nm window — large enough that 193 nm ArF diffraction actually resolves edges. At 1 nm/px (the previous default) every feature collapsed sub-resolution and wafer-level metrics were degenerate.
dummy-identitycopies the design straight through. Its mask-EPE is zero by construction (design == target), but its wafer-EPE and L2 are nonzero because Hopkins diffraction rounds Manhattan corners — that is the whole point of OPC. Identity exists as a floor, not a competitor.rule-based-opcapplies analytic per-edge bias OPC. The bias increases mask-EPE (the printed mask intentionally differs from the target) and L2 — on this synthetic suite it is over-corrected. Useful as a non-trivial baseline below the ILT methods.levelset-iltruns 200 iterations of gradient-descent ILT under the default Gaussian PSF forward model (sigma_px=2.0). It is the only model that beats Identity on wafer L2 (294.9 vs 299.9) on this suite; the lower MRC pass rate reflects narrow features that fall under the defaultmin_width_nm=40rather than an optimizer regression. Run against a real LithoBench layout or relaxed MRC thresholds for production-grade numbers. Single-exposure regime — multi-patterning flows (LELE / SAQP / SADP) require upstream colouring + a per-mask optimisation pass; OpenLithoHub does not currently decompose the target.openiltis the OpenILT-style baseline (clean-room PyTorch reimplementation of the SimpleILT formulation, MIT-licensed upstream pinned at commitdabb97c). Optimizes the MOSAIC L2 + PVBand objective with SGD across a 3-corner dose/defocus sweep. On the synthetic 64×64 suite SGD converges to ≈Identity (its internal forward model already prints the target cleanly so no improvement is found); it diverges from Identity once fed real production layouts where corner rounding and end-shortening are non-trivial. Citation: Gao et al., "MOSAIC", DAC 2014.neural-iltis a U-Net mask predictor. Public seed weights for v0.1 are released on HuggingFace asopenlithohub/neural-ilt-v0.1—NeuralILTModel(pretrained=True)andscripts/generate_baselines.py --pretrained(default) both pull them. v0.1 was trained on synthetic dummy layouts, so on this suite it lands at the same numbers as Identity / OpenILT; a v1.0 LithoBench-trained release is planned and will diverge. With--no-pretrainedthe model falls back to a randomly-initialised U-Net, which is what the older "no-weights" numbers reflected.MRC passis the fraction of samples whose mask passes both the width and spacing rules in the active rule deck (pass/fail per sample, not per pixel). The underlyingMRCResult.violation_countis a pixel-count sum — it scales with feature area and is not directly comparable to DRCviolation_count, which counts connected components capped at the rule'smax_reports.passedvspassedcomparisons across MRC and DRC are well-defined; raw-magnitude comparisons are not.
Reproducing on real data¶
Once you have LithoBench cached locally:
python scripts/generate_baselines.py \
--data-root /path/to/lithobench \
--limit 16 \
--pixel-nm 1.0 \
--output baselines/lithobench/
The same results.json / results.md artifacts land under the chosen
output directory. Submit them to the public leaderboard with
openlithohub leaderboard submit --file <results.json>.
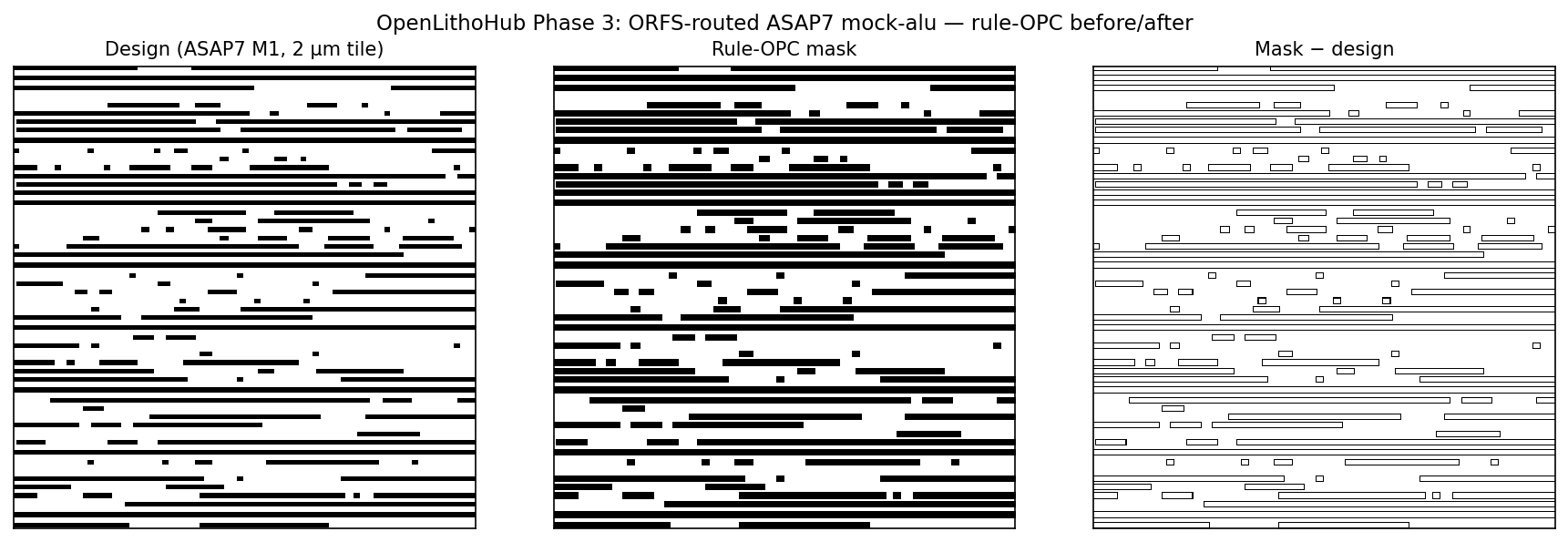
ORFS-routed ASAP7 — RISC-V mock-alu (issue #4 Phase 3)¶
OpenLithoHub also supports real ASAP7-routed RTL→GDSII outputs via the
OrfsArtifactDataset adapter. The first end-to-end target is
mock-alu from
OpenROAD-flow-scripts:
the smallest RISC-V-style ALU design that exercises a complete flow
(yosys → OpenROAD → routed GDS) in ~25 minutes on a Linux runner.
The adapter rasterizes one design layer of the routed block, then cuts it into fixed-size tiles. The default 2 µm × 2 µm and 5 µm × 5 µm windows match the AI-OPC inference scales used in the literature.
To produce the GDS, trigger the
build-asap7-mock-alu workflow
(gh workflow run build-asap7-mock-alu.yml), download the artifact,
and run:
.venv/bin/openlithohub eval run \
--dataset orfs --node 7nm --accept-license \
--data-root /path/to/6_final.gds \
--tile-nm 2000 --pixel-nm 4.0 \
--no-drc --no-mrc \
--model dummy-identity
| Window | Tiles total | PVB mean (nm) | PVB max (nm) |
|---|---|---|---|
| 2 µm × 2 µm | 729 | 15.073 | 29.600 |
| 5 µm × 5 µm | 121 | 14.980 | 39.600 |
ORFS pinned at 74b5f96; metal1 layer 20/0; pixel_nm=4.0 (a 1 nm
grid would be 16× more pixels and the PV-band convolution scales
O(N²)). Linux-only locally — see
scripts/build_riscv_alu.sh
for the equivalent local commands.
Hotspot detection — ICCAD 2016 Problem C¶
The ICCAD'16 EUV hotspot benchmark (Yang2016_ICCAD16Bench) is wired in
via openlithohub.data.Iccad16Dataset (klayout-based OASIS rasterizer)
and the point-matching metric compute_hotspot_detection. Together
they support a separate baseline track from the mask-optimization
numbers above. The dataset ships no reference OPC mask, so the
EPE / L2 metrics that require a ground-truth mask do not apply — but
PVB and DRC/MRC, which only need a model-generated mask, are
well-defined and reported in the
mask-optimization sub-section
below.
Dataset¶
- 4 published test cases (
testcase{1..4}.oas+test{1..4}.csv) mirrored at https://github.com/phdyang007/ICCAD16-N7M2EUV. - Layer
(1000, 0)is the design polygons; layer(10000, 0)is the hotspot-detection clip-site grid (16×16 nm windows, ~120 per case), exposed viaLithoSample.metadata['clip_sites']. - Hotspot annotations live in
metadata['hotspots']as(hotspot_id, category_id, x_nm, y_nm)rows. The contest's category-id-to-defect-kind mapping (EPE / Bridging / Necking) is not published, so the loader preserves the raw integer. LithoSample.maskis intentionallyNonefor this dataset.
Metric¶
compute_hotspot_detection(predicted_points, ground_truth_points,
match_radius_nm) does greedy point-matching: each predicted point
counts as a TP iff an unmatched GT point lies within
match_radius_nm. Returns
{num_tp, num_fp, num_fn, recall, precision, f1}. Edge cases follow
sklearn convention — empty-vs-empty is a vacuous perfect score; empty
predictions against present GT give recall=0, precision=1.0.
Baselines¶
Sanity baselines (not ML predictors) are produced by:
python scripts/run_hotspot_baseline.py \
--data-root data/iccad16 \
--output out/hotspot \
--match-radius-nm 100.0
Numbers below are from testcase1 (18 GT hotspots) at
match_radius_nm=100 — the strict 1 nm radius is shown in the script's
default output and gives all-zero TP for these strawman predictors.
| Model | GT | Predicted | TP | FP | FN | Recall | Precision | F1 |
|---|---|---|---|---|---|---|---|---|
empty |
18 | 0 | 0 | 0 | 18 | 0.000 | 1.000 | 0.000 |
grid-200nm |
18 | 80 | 2 | 78 | 16 | 0.111 | 0.025 | 0.041 |
clip-centers |
18 | 120 | 1 | 119 | 17 | 0.056 | 0.008 | 0.014 |
Things worth knowing:
emptypredicts nothing. It pins the recall floor (0.0) while scoring vacuous precision=1.0; useful as a "metric is alive" check.grid-200nmrasters predictions on a 200 nm lattice over the design bbox. Saturates the FP rate to expose the recall ceiling attainable by a brute-force "guess everywhere" predictor.clip-centerstreats the auxiliary clip-site layer as a predictor. It performs near-zero — confirming our empirical finding that the clip-site grid is an inspection-window layer, not a hotspot mask. The 70+ nm separation between clip centers and CSV hotspots makes this baseline a useful regression check against anyone re-mistaking layer 10000 for ground truth.
A real ML predictor (CNN, ViT, etc.) plugs into the same script by
adding a function to the PREDICTORS dict that consumes a
LithoSample and returns an (N, 2) tensor of nm-coordinates.
Mask-optimization track on ICCAD16 testcase1¶
The same Iccad16Dataset adapter also feeds the mask-optimization
metric stack via openlithohub eval run --dataset iccad16 …. Rasterized
at pixel_nm=4.0 (475×375 px — 1 nm/px would multiply runtime ~16× without
adding metric resolution at 7nm node settings), the canonical published
testcase1 produces:
| Model | Samples | PVB mean (nm) | PVB max (nm) | MRC pass | MRC viol rate | DRC pass |
|---|---|---|---|---|---|---|
dummy-identity |
1 | 14.82 | 64.0 | ❌ | 15.93% | ❌ |
rule-based-opc |
1 | 12.39 | 32.0 | ❌ | 14.89% | ❌ |
levelset-ilt |
1 | 10.49 | 32.0 | ❌ | 0.97% | ❌ |
openilt |
1 | 14.82 | 64.0 | ❌ | 15.93% | ❌ |
neural-ilt |
1 | 0.00 | 0.0 | ✅ | 0% | ✅ |
Reproduce with:
.venv/bin/openlithohub eval run \
--model levelset-ilt --dataset iccad16 \
--data-root data/iccad16 \
--node 7nm --pixel-nm 4.0
Things worth knowing:
- EPE / L2 not reported. Both require a reference OPC mask;
ICCAD16 ships hotspot-annotated layouts only, so
LithoSample.mask is None. PVB / DRC / MRC require only a model-generated mask and are well-defined. neural-iltnumbers are degenerate. The v0.1 weights were trained on synthetic 64-pixel tiles. Running on a 475×375 ICCAD16 raster produces a near-blank mask which trivially passes everything with zero PV-band — this is the out-of-distribution failure mode, not a competitive score. Treat it as a smoke test of the pipeline, not as a published number. A retrainedneural-ilt-v0.2againstYang2016_ICCAD16Benchwould change this.openiltmatchesdummy-identityexactly. OpenILT's SimpleILT formulation finds no improvement when its internal forward model already prints the target cleanly, falling back to identity (same behaviour as the synthetic-8 suite).levelset-iltis the only baseline that improves PVB and MRC vs. identity — the same ranking as the synthetic-8 suite, validating that the pipeline behaves coherently on real data.- MRC at 7nm is brutal.
min_width_nm=20is the default for the 7nm node, applied to a layout that includes hotspot patterns deliberately designed to violate width / spacing rules —dummy-identityfailing MRC is expected for a hotspot benchmark.
GAN-OPC paired-mask dataset¶
openlithohub.data.GanOpcDataset exposes the ~4875 paired-PNG training
set from Yang et al., GAN-OPC: Mask Optimization with
Lithography-guided Generative Adversarial Nets (DAC 2018,
doi:10.1145/3195970.3196056;
a paywalled TCAD 2020 extension exists but the DAC paper is canonical).
Source: https://github.com/phdyang007/GAN-OPC (multi-volume 7z archive,
unpacks to ganopc-data/{artitgt,artimsk}/N.glp.png +
N.glpOPC.png).
from openlithohub.data import GanOpcDataset
ds = GanOpcDataset("data/ganopc/extracted") # parent of ganopc-data/
sample = ds[0]
sample.design # (2048, 2048) torch.float32, {0., 1.}
sample.mask # (2048, 2048) torch.float32, {0., 1.}
The pairs are (design_layout, OPC_mask) so this dataset is suitable
for AI-OPC training and for evaluating mask-optimization models with
the standard EPE / PVB / shot-count / MRC metric stack — though no
canonical baseline numbers are published here yet.
Differentiable forward models¶
Two forward models ship in openlithohub._utils. Both are pure PyTorch
and auto-differentiable, so they slot directly into ILT optimization
loops, AI-OPC training, or any downstream gradient-based pipeline.
Which forward model does which metric use?
compute_l2_errorandcompute_wafer_eperoute through Hopkins/SOCS (the partial-coherent path used by the leaderboard). The PV-Band metric (compute_pvband) uses the fast Gaussian PSF approximation, not SOCS — it sweeps dose/focus corners cheaply at the cost of physical fidelity. Treat PVB and L2 as different forward passes; do not assume one validates the other.
Gaussian PSF (default)¶
simulate_aerial_image(mask, sigma_px, dose=1.0) — a single Gaussian
point spread function convolved with the mask. Fast, faithful enough for
unit tests and small synthetic patterns, and used as the default in
LevelSetILTModel.
Hopkins partial-coherent imaging (SOCS)¶
simulate_aerial_image_hopkins(mask, params) implements the Sum-of-Coherent-
Systems decomposition of the Hopkins transmission cross coefficient. It
captures partial coherence, off-axis illumination, and defocus, which
the Gaussian model cannot.
Configurable via HopkinsParams:
| Field | Default | Meaning |
|---|---|---|
wavelength_nm |
193.0 | Exposure wavelength (193 nm = ArF, 13.5 nm = EUV) |
na |
1.35 | Numerical aperture (image-side) |
sigma |
0.7 | Partial-coherence factor; outer sigma for annular/dipole/quasar |
sigma_inner |
0.0 | Inner sigma for off-axis illumination |
pixel_size_nm |
1.0 | Physical mask pixel size |
num_kernels |
24 | SOCS truncation order |
illumination |
"circular" |
One of circular, annular, dipole, quasar |
dipole_angle_deg |
0.0 | Pole-pair orientation for dipole/quasar |
defocus_nm |
0.0 | Defocus offset (parabolic phase) |
Switch LevelSetILTModel to Hopkins:
from openlithohub._utils import HopkinsParams
from openlithohub.models.levelset_ilt import LevelSetILTModel
model = LevelSetILTModel(
iterations=200,
forward_model="hopkins",
hopkins_params=HopkinsParams(
wavelength_nm=193.0,
na=1.35,
sigma=0.7,
num_kernels=24,
pixel_size_nm=2.0,
),
)
result = model.predict(design) # standard PredictionResult
The kernels are computed once and cached per (params, grid_size, device),
so iterative ILT loops pay the SVD cost a single time.